0 ITEMS查看購物車
-24%





- 描述
- Size Guide
- 評價 (0)
描述
描述
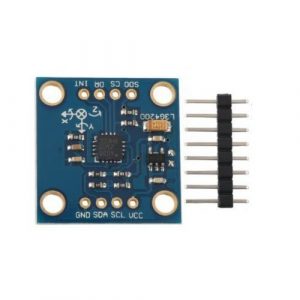
L3G4200D三軸數位陀螺儀感測器 角速度模組 GY-50
L3G4200D三軸數位陀螺儀感測器 低功耗三軸角速率傳感器的分線板。L3G4200D 是一款MEMS運動傳感器,滿量程為±250 /±500 /±2000 dps,能夠通過用戶可選帶寬測量速率。這些在遊戲和虛擬現實輸入設備,GPS導航系統和機器人技術方面非常有用。
- L3G4200D 模組 (三軸陀螺儀模組)
- 使用晶片:L3G4200D
- 供電電源:3-5v
- 三種可選的滿量程(250/500/2000 dps)
- I2C / SPI數字輸出接口
- 16位速率值數據輸出
- 8位溫度數據輸出
- 寬電源電壓:2.4 V至3.6 V.
- 低電壓兼容IO(1.8 V)
- 嵌入式斷電和睡眠模式
- 嵌入式溫度傳感器
- 高衝擊生存能力
函數庫 https://github.com/pololu/l3g-arduino
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
/* The sensor outputs provided by the library are the raw 16-bit values obtained by concatenating the 8-bit high and low gyro data registers. They can be converted to units of dps (degrees per second) using the conversion factors specified in the datasheet for your particular device and full scale setting (gain). Example: An L3GD20H gives a gyro X axis reading of 345 with its default full scale setting of +/- 245 dps. The So specification in the L3GD20H datasheet (page 10) states a conversion factor of 8.75 mdps/LSB (least significant bit) at this FS setting, so the raw reading of 345 corresponds to 345 * 8.75 = 3020 mdps = 3.02 dps. */ #include <Wire.h> #include <L3G.h> L3G gyro; void setup() { Serial.begin(9600); Wire.begin(); if (!gyro.init()) { Serial.println("Failed to autodetect gyro type!"); while (1); } gyro.enableDefault(); } void loop() { gyro.read(); Serial.print("G "); Serial.print("X: "); Serial.print((int)gyro.g.x); Serial.print(" Y: "); Serial.print((int)gyro.g.y); Serial.print(" Z: "); Serial.println((int)gyro.g.z); delay(100); } |





商品評價
目前沒有評價。