1 ITEM查看購物車
-
LIDAR-Lite v3HP 雷射激光高性能光學距離測量感測器增強版 3D 環境掃描 1 × NT$5,430

小計: NT$5,430
+123 5678 890

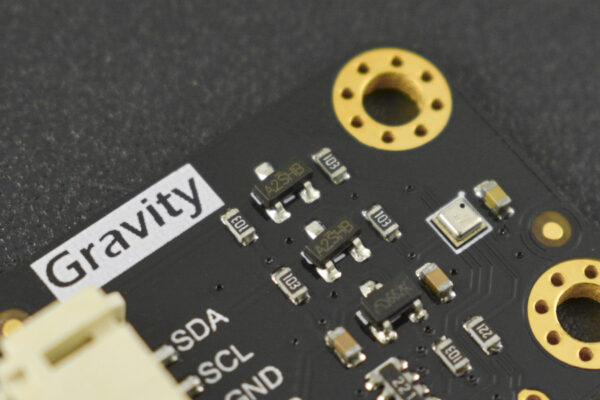





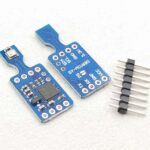
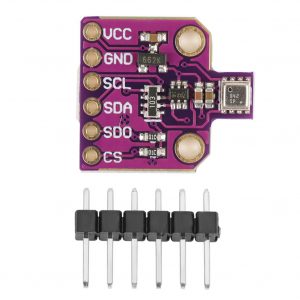
這款由 DFRobot 發表的新型 Gravity BMP388 氣壓感測器模組 具有溫度和壓力測量功能。它支持Arduino代碼控制。與早期版本的BMP180,BMP280和BMP388相比,該傳感器具有更低的功耗,更高的分辨率和更高的採樣率。
氣壓通常用於測量氣壓和溫度。但除此之外,我們還可以使用傳感器測量高度和相對樓層高度,因為高度和氣壓之間存在一定的關係。更重要的是,BMP388可實現精確的GPS跟踪。所以使用IMU傳感器和BMP388,我們可以體驗3D室內定位和導航。
BMP388 氣壓感測器模組 基於博世成熟的壓電電阻式壓力傳感器技術,具有高精度,低功耗和高EMC穩健性。該傳感器的精度約為±8Pa,相當於高度差±0.5m,絕對精度溫度為±0.5℃,溫度範圍為0℃至65℃。
 注意:請勿用手指觸摸傳感器,因為它對外部環境非常敏感。
注意:請勿用手指觸摸傳感器,因為它對外部環境非常敏感。


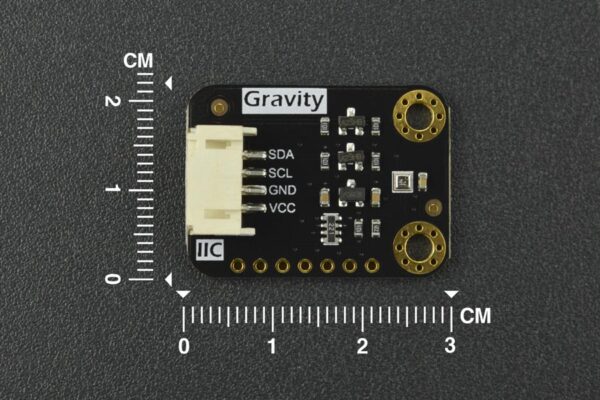
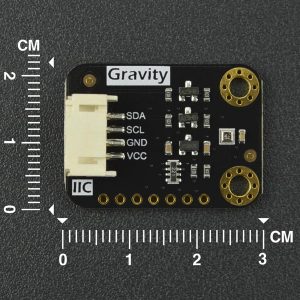
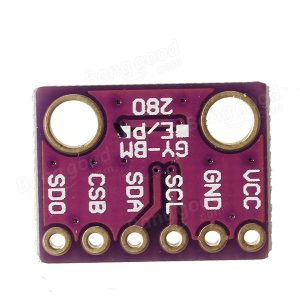
| 絲印 | 描述 |
|---|---|
| SDA | IIC數據 |
| SCL | IIC時鐘 |
| INT | 中斷輸出引腳 |
| SCK | SPI-CLK |
| SDI | SPI-MOSI |
| CSB | SPI-CS |
| SDO | SPI-MISO / IIC地址選擇 |
| GND | 負極 |
| VCC | 陽極 |
檢測當前環境的氣壓和溫度,併計算模塊所處環境的高度。
Arduino IDE
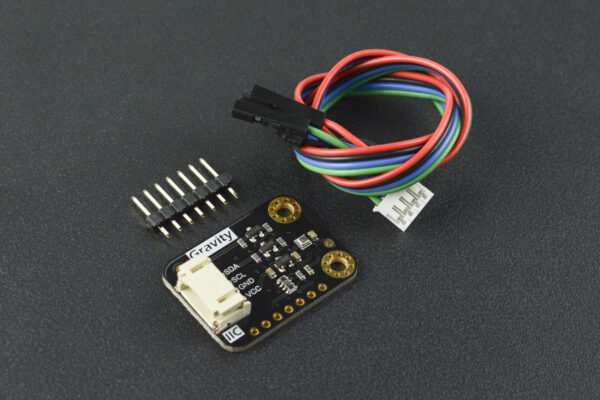
通過I2C接口將模塊與UNO主板連接,如下所示。

下載BMP388庫文件。如何安裝庫? 複製以下代碼並將其刻錄到單晶片中。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 |
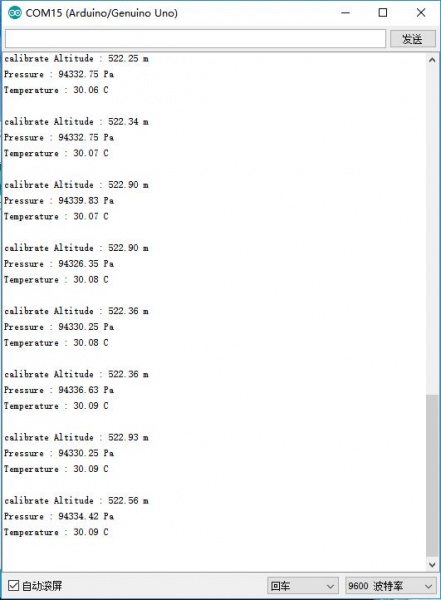
/*! * file bmp388test.ino * * Connect BMP388 to IIC interface of Arduino, download the program. * Altitude is calculated based on temperature and sea level pressure. * The example can count an approximate altitude. * * @n Open the serial monitor, check the altitude. * @n Open serial monitor, the temperature could be checked. * @n Open serial monitor, the atmospheric pressure could be checked. * * Copyright [DFRobot](http://www.dfrobot.com), 2016 * Copyright GNU Lesser General Public License * * version V0.1 * date 2018-5-29 */ #include "DFRobot_BMP388.h" #include "DFRobot_BMP388_I2C.h" #include "Wire.h" #include "SPI.h" #include "math.h" #include "bmp3_defs.h" /*If there is no need to calibrate altitude, comment this line*/ #define CALIBRATE_Altitude /*Create a bmp388 object to communicate with IIC.*/ DFRobot_BMP388_I2C bmp388; float seaLevel; void setup(){ /* Initialize the serial port*/ Serial.begin(9600); /* Initialize bmp388*/ while(bmp388.begin()){ Serial.println("Initialize error!"); delay(1000); } /*You can use an accurate altitude to calibrate sea level air pressure. *And then use this calibrated sea level pressure as a reference to obtain the calibrated altitude. *In this case,525.0m is chendu accurate altitude. */ delay(100); seaLevel = bmp388.readSeaLevel(525.0); Serial.print("seaLevel : "); Serial.print(seaLevel); Serial.println(" Pa"); } void loop(){ #ifdef CALIBRATE_Altitude /* Read the calibrated altitude */ float altitude = bmp388.readCalibratedAltitude(seaLevel); Serial.print("calibrate Altitude : "); Serial.print(altitude); Serial.println(" m"); #else /* Read the altitude */ float altitude = bmp388.readAltitude(); Serial.print("Altitude : "); Serial.print(altitude); Serial.println(" m"); #endif delay(100); /* Read the atmospheric pressure, print data via serial port.*/ float Pressure = bmp388.readPressure(); Serial.print("Pressure : "); Serial.print(Pressure); Serial.println(" Pa"); delay(100); /* Read the temperature, print data via serial port.*/ float Temperature = bmp388.readTemperature(); Serial.print("Temperature : "); Serial.print(Temperature); Serial.println(" C"); Serial.println(); delay(1000); } |
檢查程序通過串口讀取的值。
The barometric pressure is usually used to measure barometric pressure and temperature. But besides that, we can also use the sensor to measure the altitude and the relative floor height due to the fact that there is a certain relationship between altitude and barometric pressure. What’s more, BMP388 enables accurate GPS tracking. So with an IMU sensor and BMP388, we can experience 3D indoor positioning and navigation.
BMP388 is based on Bosch’s mature Piezo resistive pressure sensor technology featuring high accuracy as well low power consumption and high EMC robustness.
The sensor features an accuracy of about ±8Pa, which is equivalent to about ±0.5m difference in altitude, and an absolute accuracy temperature of ±0.5℃ for a temperature range between 0℃ and 65℃.






商品評價
目前沒有評價。